Optimizing Control Over Markovian Wireless Communication Channels: A Deep Dive
Wireless networked control systems (WNCS) are rapidly evolving due to their extensive applications in industrial automation, intelligent transportation, telesurgery, and smart grids. The ability to accurately estimate wireless channel conditions significantly enhances control loop performance, making it an area of significant research and development.
This blog post explores optimal control over Markovian wireless communication channels under generalized packet dropout compensation. We will analyze how Markov jump linear systems (MJLS) provide an effective framework for addressing stochastic message losses, finite-horizon and infinite-horizon linear quadratic regulation (LQR) problems, and stability conditions. Finally, we will delve into practical implementations and the benefits of this approach through numerical validations.
Understanding Wireless Networked Control Systems
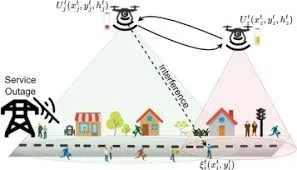
In any WNCS, data transmission occurs over wireless links, which are inherently unreliable due to fading, path loss, and interference. These impairments cause stochastic variations in packet delivery, leading to message dropouts, delays, and jitter. To model and predict these uncertainties, researchers have employed the Finite-State Markov Channel (FSMC) model.
FSMC provides a structured method to model wireless channels by capturing time-varying behavior in discrete states. However, conventional models like the Bernoulli process fail to capture the intricacies of packet dropout dynamics. To overcome this, recent studies have introduced FSMC into wireless networked control frameworks for optimal output-feedback control, significantly improving system performance.
Markov Jump Linear Systems (MJLS) for Control Optimization
A key contribution in this domain is the adoption of MJLS, which incorporates FSMC-based wireless channels into control design. This approach accounts for both the stochastic nature of packet dropouts and the real-time channel state observation. The system utilizes a discrete-time Markov chain (DTMC) to describe the packet loss process, ensuring a robust control strategy.
In MJLS, actuators compensate for packet dropouts using a generalized control dropout compensation mechanism. Instead of simply setting the control input to zero (zero-input compensation) or holding the last received control input (hold-input compensation), the system applies an appropriately scaled last available control input. This method enhances stability and control performance, especially in scenarios where immediate zeroing of control inputs is impractical.
Finite-Horizon and Infinite-Horizon LQR Optimization
Two key optimization problems arise in MJLS-based wireless control systems:
1. Finite-Horizon LQR
This optimization problem minimizes the cost function over a finite time horizon . The cost function includes both the state deviation and the control effort, ensuring optimal control performance over a predefined period. Mathematically, the finite-horizon LQR is formulated as: where is a positive semi-definite state-weighting matrix, and is a positive-definite input-weighting matrix.
2. Infinite-Horizon LQR
For long-term stability and performance, the infinite-horizon LQR problem is considered. The goal is to minimize the long-run average cost, ensuring the system remains stable under persistent stochastic disturbances. The optimization problem is given by:
The challenge in both these optimization problems is incorporating FSMC-based packet loss dynamics and ensuring control stability. By leveraging the MJLS framework, researchers have developed efficient algorithms to compute optimal state-feedback gains that adapt to real-time channel state observations.
Stability Analysis and Verification
Ensuring stability in WNCS is crucial, particularly in the presence of unpredictable wireless link failures. The proposed MJLS-based control strategy introduces a necessary and sufficient stability condition based on the spectral radius of a stability verification matrix.
The stability criterion requires computing the spectral radius of a matrix that captures both system dynamics and Markovian state transitions. If the spectral radius is less than one, the system is guaranteed to remain stable under the given control law. This simple yet effective condition makes it easy to verify stability for any infinite-horizon state-feedback control policy.
Practical Implementation and Monte Carlo Simulations
To validate the effectiveness of the proposed control strategy, extensive Monte Carlo simulations have been conducted. These simulations involve a rotary inverted pendulum controlled remotely over a wireless link modeled using FSMC.
Key Findings:
- The generalized packet dropout compensation approach significantly improves stability and performance compared to traditional zero-input and hold-input compensations.
- Channel state-dependent control laws enhance robustness by dynamically adjusting control gains based on real-time FSMC observations.
- The stability verification method is computationally efficient, making it feasible for real-world implementations.
Conclusion
The integration of FSMC models into wireless networked control systems presents a powerful approach to mitigating the adverse effects of stochastic packet losses. By leveraging Markov jump linear systems, finite-horizon and infinite-horizon LQR optimization, and robust stability conditions, engineers can design highly resilient and efficient control systems.
Future research can further explore adaptive learning techniques for real-time FSMC parameter estimation and advanced dropout compensation strategies tailored for emerging industrial automation applications.
References:
- Y. Zacchia Lun, F. Smarra, A. D’Innocenzo, "Optimal Control Over Markovian Wireless Communication Channels Under Generalized Packet Dropout Compensation," Automatica, 2025.
- IEEE Transactions on Control Systems Technology, 2024.
- Advances in Networked Control Systems, Springer, 2023.
What's Your Reaction?